- Есть вопросы?
- 8(961)1155384
- zakaz@kursach37.com

Теория машин и механизмов курсовая работа
Содержание:
Задание
Введение
1. Кинематический анализ механизма
1.1. Проектирование кривошипно-ползунного механизма
1.2. Структурное исследование механизма
1.3. Построение схемы механизма
1.4. Построение планов скоростей механизма
1.5. Построение планов ускорений механизма
1.6. Кинематические диаграммы точки D ползуна 3
1.7. Расчет скоростей и ускорений ползуна методом Зиновьева.
Метод Зиновьева. Положение 1.
Метод Зиновьева. Положение 2.
Метод Зиновьева. Положение 3.
Метод Зиновьева. Положение 4.
Метод Зиновьева. Положение 5.
Метод Зиновьева. Положение 6.
2. Силовой расчет рычажного механизма
2.1. Определение движущей силы Р (силы сопротивления, приложенной к ползуну 5)
2.2. Определение сил инерции звеньев
2.3. Определение реакций в кинематических парах групп Ассура
2.4. Силовой расчет ведущего звена механизма
2.5. Рычаг Н.Е. Жуковского.
3. Расчет маховика.
4. Синтез кулачкового механизма.
4.1. Определение минимального радиуса кулачка Rmin
4.2. Построение профиля кулачка
Список литературы
Введение
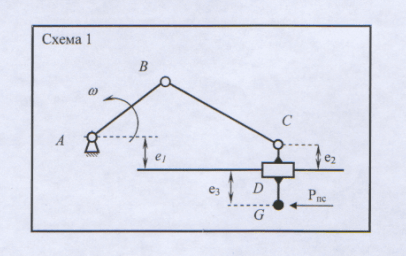
Объектом исследования является кривошипно-ползунный механизм.
В курсовом проекте исследованию подлежат рычажный и кулачковый механизм.
Рычажный механизм служит для преобразования возвратно-поступательного перемещение ползуна 3 из вращательного движения кривошипа 1.
В рычажных механизмах угловая скорость непостоянна и для более равномерного движения на валу кривошипа установлен маховик.
Для управления зажимом деталей применяется кулачковый механизм, который служит для преобразования вращательного движения в поступательное движение ведомого звена.
1. Кинематический анализ механизма
1.1. Проектирование кривошипно-ползунного механизма
Значения длин кривошипа АВ и шатуна ВС даны по условию.
![]() м,
м, ![]() м.
м. ![]() м,
м, ![]() м,
м, ![]() м,
м, ![]() м.
м.
1.2. Структурное исследование механизма
Определяем степень подвижности механизма по формуле
П.Л. Чебышева.
![]()
где ![]() — число подвижных звеньев (кривошип АВ, шатун ВС, ползун D);
— число подвижных звеньев (кривошип АВ, шатун ВС, ползун D);
![]() — число кинематических пар пятого класса (A(0;1), B(1,2), C(2,3), D(3,0));
— число кинематических пар пятого класса (A(0;1), B(1,2), C(2,3), D(3,0));
![]() — число кинематических пар четвертого класса..
— число кинематических пар четвертого класса..
Определяем класс и порядок механизма. Для этого разделим механизм на группы Ассура. Этот механизм состоит из одной группы Ассура II класса 1-го порядка 2-го вида (рис. 1, а), одной группы Ассура II класса 2-го порядка 2-го (рис. 1, а) вида и механизма I класса, состоящего из ведущего звена 1 и стойки 6.
В целом рассматриваемый механизм II класса 2-го порядка.
1.3. Построение схемы механизма
Масштаб схемы. Приняв на чертеже (см. лист 1 приложения) отрезок АB = 25 мм, находим:
![]() .
.
В принятом масштабе вычерчиваем схему механизма. Для построения 6 положений звеньев механизма разделим траекторию, описываемую точкой B кривошипа, на 6 равных частей. В качестве нулевого принимаем то положение кривошипа, при котором точка C ползуна занимает крайнее левое положение. Из отмеченных на окружности точек В0, В1…В6 раствором циркуля равным ![]() мм, намечаем на линии движения точки С точки 0, 1, 2 и т. д. (положения точки С). Соединяем точку В1 с точкой 1, точку В2 с точкой 2 и т. д. Получаем положения точки С.
мм, намечаем на линии движения точки С точки 0, 1, 2 и т. д. (положения точки С). Соединяем точку В1 с точкой 1, точку В2 с точкой 2 и т. д. Получаем положения точки С.
Скачать курсовую работу по ТММ (записка)
Чертеж лист 1
Чертеж лист 2
Чертеж лист 3


{kind=link}
{kind=link}
{kind=link}